散列表¶
1. 定义¶
散列表(Hash table,也叫哈希表),是根据关键码值(Key value)而直接进行访问的数据结构。也就是说,它通过把关键码值映射到表中一个位置来访问记录,以加快查找的速度。这个映射函数叫做散列函数,存放记录的数组叫做散列表。
散列表用的就是数组支持按照下标随机访问的时候,时间复杂度是 O(1) 的特性。我们通过散列函数把元素的键值映射为下标,然后将数据存储在数组中对应下标的位置。当我们按照键值查询元素时,我们用同样的散列函数,将键值转化数组下标,从对应的数组下标的位置取数据。
2. 散列函数¶
散列函数是散列表的核心,也是散列表存储和读取数据的基础。散列函数的作用是给定一个键值,然后返回值在表中的地址。
散列函数设计的基本要求:
-
散列函数计算得到的散列值是一个非负整数;
-
如果 key1 = key2,那 hash(key1) == hash(key2);
-
如果 key1 ≠ key2,那 hash(key1) ≠ hash(key2)。
2.1 如何设计散列函数?¶
-
首先,散列函数的设计不能太复杂 , 过于复杂的散列函数,势必会消耗很多计算时间,也就间接地影响到散列表的性能。
-
其次,散列函数生成的值要尽可能随机并且均匀分布,这样才能避免或者最小化散列冲突,而且即便出现冲突,散列到每个槽里的数据也会比较平均,不会出现某个槽内数据特别多的情况。
实际工作中,我们还需要综合考虑各种因素。这些因素有关键字的长度、特点、分布、还有散列表的大小等。
散列函数的设计方法有很多种,比如直接定址法、数字分析法、平方取中法、折叠法、除留余数法、随机数法等。
3. 散列冲突¶
散列函数的设计要尽可能地避免冲突,也就是不同的键值经过散列函数映射到散列表的同一个位置。如果散列表中的存储空间比较紧张,那么冲突就会比较严重,这样就会影响散列表的性能。所以,散列函数设计的越好,冲突就越少,散列表的性能就越好。
散列冲突的解决方法有很多种,比如开放寻址法、链表法、再哈希法等。
3.1 开放寻址法¶
开放寻址法的基本思想是:如果出现了散列冲突,就重新探测一个空闲位置,将其插入。探测的方法有线性探测、二次探测、再哈希法等。
3.1.1 线性探测¶
线性探测的基本思想是:当我们往散列表中插入数据时,如果某个数据经过散列函数散列之后,存储位置已经被占用了,我们就从当前位置开始,依次往后查找,看是否有空闲位置,直到找到为止。

线性探测法其实存在很大问题。当散列表中插入的数据越来越多时,散列冲突发生的可能性就会越来越大,空闲位置会越来越少,线性探测的时间就会越来越久。极端情况下,我们可能需要探测整个散列表,所以最坏情况下的时间复杂度为 O(n)。同理,在删除和查找时,也有可能会线性探测整张散列表,才能找到要查找或者删除的数据。
3.1.2 二次探测¶
二次探测的基本思想是:所谓二次探测,跟线性探测很像,线性探测每次探测的步长是 1,那它探测的下标序列就是 hash(key)+0,hash(key)+1,hash(key)+2……而二次探测探测的步长就变成了原来的“二次方”,也就是说,它探测的下标序列就是 hash(key)+0,hash(key)+12,hash(key)+22……
二次探测法的时间复杂度分析跟线性探测法一样,最坏情况下的时间复杂度为 O(n)。
3.1.3 再哈希法/双重散列¶
再哈希法的基本思想是:所谓双重散列,意思就是不仅要使用一个散列函数。我们使用一组散列函数 hash1(key),hash2(key),hash3(key)……我们先用第一个散列函数,如果计算得到的存储位置已经被占用,再用第二个散列函数,依次类推,直到找到空闲的存储位置。
3.2 链表法¶
链表法的基本思想是:我们把散列表的每个槽位当成一个链表的头结点,当多个数据散列到同一个槽位时,我们把它们添加到链表中。
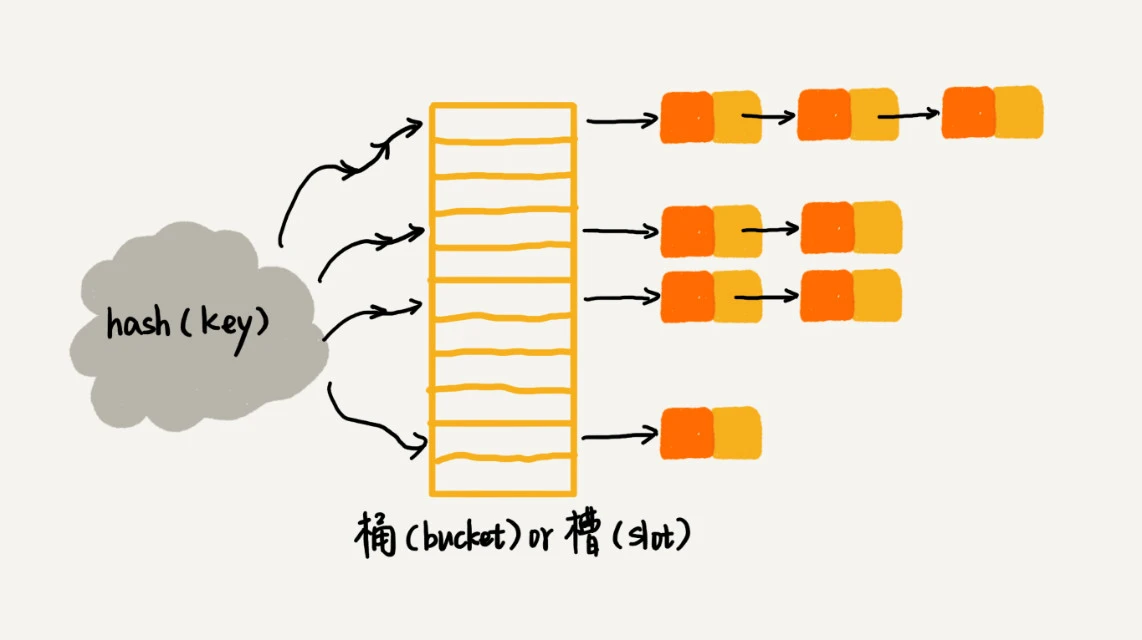
当插入的时候,我们只需要通过散列函数计算出对应的散列槽位,将其插入到对应链表中即可,所以插入的时间复杂度是 O(1)。当查找、删除一个元素时,我们同样通过散列函数计算出对应的槽,然后遍历链表查找或者删除。实际上,这两个操作的时间复杂度跟链表的长度 k 成正比,也就是 O(k)。对于散列比较均匀的散列函数来说,理论上讲,k=n/m,其中 n 表示散列中数据的个数,m 表示散列表中“槽”的个数。
3.3 如何选择冲突解决方法?¶
开放寻址法和链表法这两种冲突解决办法在实际的软件开发中都非常常用。比如,Java 中 LinkedHashMap 就采用了链表法解决冲突,ThreadLocalMap 是通过线性探测的开放寻址法来解决冲突。那你知道,这两种冲突解决方法各有什么优势和劣势,又各自适用哪些场景吗?
3.3.1 开放寻址法优缺点¶
优点 开放寻址法不像链表法,需要拉很多链表。散列表中的数据都存储在数组中,可以有效地利用 CPU 缓存加快查询速度。而且,这种方法实现的散列表,序列化起来比较简单。链表法包含指针,序列化起来就没那么容易。
缺点 用开放寻址法解决冲突的散列表,删除数据的时候比较麻烦,需要特殊标记已经删除掉的数据。而且,在开放寻址法中,所有的数据都存储在一个数组中,比起链表法来说,冲突的代价更高。所以,使用开放寻址法解决冲突的散列表,装载因子的上限不能太大。这也导致这种方法比链表法更浪费内存空间。
当数据量比较小、装载因子小的时候,适合采用开放寻址法。这也是 Java 中的ThreadLocalMap使用开放寻址法解决散列冲突的原因。
3.3.2 链表法优缺点¶
优点 1. 链表法对内存的利用率比开放寻址法要高。因为链表结点可以在需要的时候再创建,并不需要像开放寻址法那样事先申请好 2. 链表法比起开放寻址法,对大装载因子的容忍度更高。开放寻址法只能适用装载因子小于 1 的情况。接近 1 时,就可能会有大量的散列冲突,导致大量的探测、再散列等,性能会下降很多。但是对于链表法来说,只要散列函数的值随机均匀,即便装载因子变成 10,也就是链表的长度变长了而已,虽然查找效率有所下降,但是比起顺序查找还是快很多。
缺点 1. 链表因为要存储指针,所以对于比较小的对象的存储,是比较消耗内存的,还有可能会让内存的消耗翻倍。 2. 因为链表中的结点是零散分布在内存中的,不是连续的,所以对 CPU 缓存是不友好的,这方面对于执行效率也有一定的影响。
当然,如果我们存储的是大对象,也就是说要存储的对象的大小远远大于一个指针的大小(4 个字节或者 8 个字节),那链表中指针的内存消耗在大对象面前就可以忽略了。
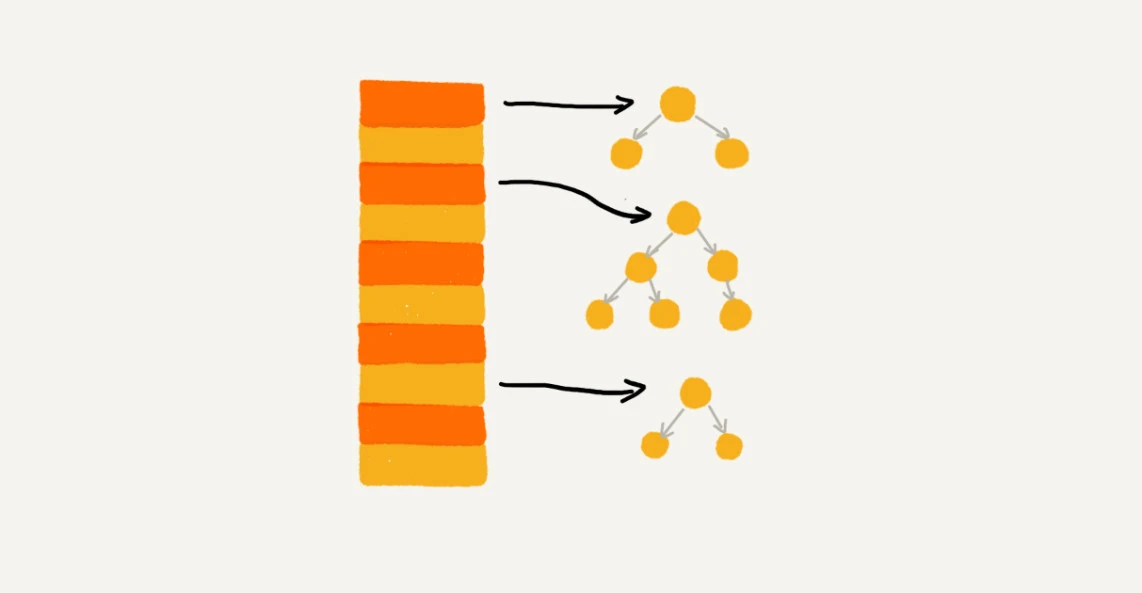
实际上,我们对链表法稍加改造,可以实现一个更加高效的散列表。那就是,我们将链表法中的链表改造为其他高效的动态数据结构,比如跳表、红黑树。这样,即便出现散列冲突,极端情况下,所有的数据都散列到同一个桶内,那最终退化成的散列表的查找时间也只不过是 O(logn)。这样也就有效避免了前面讲到的散列碰撞攻击。
基于链表的散列冲突处理方法比较适合存储大对象、大数据量的散列表,而且,比起开放寻址法,它更加灵活,支持更多的优化策略,比如用红黑树代替链表。
4 装载因子¶
不管采用哪种探测方法,当散列表中空闲位置不多的时候,散列冲突的概率就会大大提高。为了尽可能保证散列表的操作效率,一般情况下,我们会尽可能保证散列表中有一定比例的空闲槽位。我们用装载因子(load factor)来表示空位的多少。
装载因子的计算公式是:
装载因子越大,说明空闲位置越少,冲突越多,散列表的性能会下降。
4.1 装载因子过大了怎么办?¶
装载因子越大,说明散列表中的元素越多,空闲位置越少,散列冲突的概率就越大。不仅插入数据的过程要多次寻址或者拉很长的链,查找的过程也会因此变得很慢。
所以,当装载因子过大的时候,我们就需要扩容,重新散列。
针对数组的扩容,数据搬移操作比较简单。但是,针对散列表的扩容,数据搬移操作要复杂很多。因为散列表的大小变了,数据的存储位置也变了,所以我们需要通过散列函数重新计算每个数据的存储位置。
对于支持动态扩容的散列表,插入操作的时间复杂度是多少呢?
插入一个数据,最好情况下,不需要扩容,最好时间复杂度是 O(1)。最坏情况下,散列表装载因子过高,启动扩容,我们需要重新申请内存空间,重新计算哈希位置,并且搬移数据,所以时间复杂度是 O(n)。用摊还分析法,均摊情况下,时间复杂度接近最好情况,就是 O(1)。
实际上,对于动态散列表,随着数据的删除,散列表中的数据会越来越少,空闲空间会越来越多。如果我们对空间消耗非常敏感,我们可以在装载因子小于某个值之后,启动动态缩容。当然,如果我们更加在意执行效率,能够容忍多消耗一点内存空间,那就可以不用费劲来缩容了。
当散列表的装载因子超过某个阈值时,就需要进行扩容。装载因子阈值需要选择得当。如果太大,会导致冲突过多;如果太小,会导致内存浪费严重。
装载因子阈值的设置要权衡时间、空间复杂度。如果内存空间不紧张,对执行效率要求很高,可以降低负载因子的阈值;相反,如果内存空间紧张,对执行效率要求又不高,可以增加负载因子的值,甚至可以大于 1。
4.2 如何避免低效的扩容?¶
大部分情况下,动态扩容的散列表插入一个数据都很快,但是在特殊情况下,当装载因子已经到达阈值,需要先进行扩容,再插入数据。这个时候,插入数据就会变得很慢,甚至会无法接受。
为了解决一次性扩容耗时过多的情况,我们可以将扩容操作穿插在插入操作的过程中,分批完成。
当有新数据要插入时,我们将新数据插入新散列表中,并且从老的散列表中拿出一个数据放入到新散列表。每次插入一个数据到散列表,我们都重复上面的过程。经过多次插入操作之后,老的散列表中的数据就一点一点全部搬移到新散列表中了。这样没有了集中的一次性数据搬移,插入操作就都变得很快了。
这期间的查询操作怎么来做呢?对于查询操作,为了兼容了新、老散列表中的数据,我们先从新散列表中查找,如果没有找到,再去老的散列表中查找。
通过这样均摊的方法,将一次性扩容的代价,均摊到多次插入操作中,就避免了一次性扩容耗时过多的情况。这种实现方式,任何情况下,插入一个数据的时间复杂度都是 O(1)。
5. 小结¶
5.1 工业级的散列表应该具有哪些特性¶
- 支持快速地查询、插入、删除操作;
- 内存占用合理,不能浪费过多的内存空间;
- 性能稳定,极端情况下,散列表的性能也不会退化到无法接受的情况。
5.2 如何实现这样一个散列表¶
- 设计一个合适的散列函数;
- 定义装载因子阈值,并且设计动态扩容策略;
- 选择合适的散列冲突解决方法。
6. 散列表和链表结合使用¶
散列表这种数据结构虽然支持非常高效的数据插入、删除、查找操作,但是散列表中的数据都是通过散列函数打乱之后无规律存储的。也就说,它无法支持按照某种顺序快速地遍历数据。如果希望按照顺序遍历散列表中的数据,那我们需要将散列表中的数据拷贝到数组中,然后排序,再遍历。
因为散列表是动态数据结构,不停地有数据的插入、删除,所以每当我们希望按顺序遍历散列表中的数据的时候,都需要先排序,那效率势必会很低。为了解决这个问题,我们将散列表和链表(或者跳表)结合在一起使用。
6.1 应用实例¶
- LRU 缓存淘汰算法
- Redis 有序集合
- LinkedHashMap